Elektros pavara - tai elektromechaninė sistema, skirta versti elektros energiją į mechaninę darbo mašinos judesio energiją, kuri atlieka vykdomąsias operacijas. Ši technologija plačiai taikoma gamyboje, kur elektros energija nuolat verčiama mechanine ir atvirkščiai. Šiuolaikinėje pramonėje vis dažniau diegiamos automatizuotos elektros pavaros.
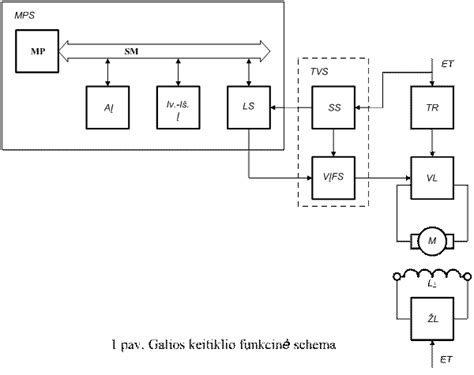
Tipinę elektros pavarą sudaro energijos šaltinis, galios keitiklis, elektros variklis ir darbinė apkrova. Kai reikalingas valdymas, naudojami jutikliai, teikiantys grįžtamąjį ryšį valdikliui. Valdiklis, apdorodamas jutiklių informaciją pagal nustatytą algoritmą, valdo galią, tiekiama į variklį, siekiant užtikrinti specifinius darbo parametrus, tokius kaip sukimosi dažnis, momentas, jėga ar pasukimo kampas.
Elektros pavaros gali būti skirstomos pagal įvairius kriterijus:
- Paskirtį darbo mašinose: pagrindinės arba pagalbinės.
- Variklių skaičių ir jų ryšį su darbo mašina: grupinės (vienas variklis varo kelis darbo įtaisus), individualiosios (vienas variklis varo vieną darbo įtaisą, variklis ir darbo mašina sudaro vientisą konstrukciją), susietosios.
- Naudojamą variklį: nuolatinės srovės, asinchroninės, sinchroninės pavaros.
- Keitiklį: tranzistorinės, tiristorinės pavaros.
- Automatinio valdymo įtaisą: automatizuotos, programinio valdymo pavaros.
- Perdavimo įtaisą.
Elektros pavarų mechanika
Nagrinėjant elektros pavarų judėjimą, viena iš dviejų galimų variklio sukimosi krypčių laikoma teigiama. Ši kryptis yra teigiama visiems dydžiams, apibūdinantiems judėjimą, įskaitant kampinį sukimosi greitį (ω) ir variklio kuriamą sukimosi momentą (M). Jei variklio greičio ir momento kryptys arba ženklai sutampa, variklis atlieka darbą, naudodamas elektros energiją. Priešingu atveju, kai momento ir sukimosi greičio ženklai skirtingi, variklis, išvystydamas momentą, vartoja mechaninę energiją.
Elektros pavaros judėjimą apibūdina du veikiantys momentai: variklio išvystomasis momentas ir pasipriešinimo arba stabdantis apkrovos momentas (Mst). Pasipriešinimo momentas gali būti reaktyvinis (atsirandantis tik dėl judėjimo ir nukreiptas prieš judėjimą, pvz., trintis) arba aktyvinis (nepriklausantis nuo pavaros judėjimo, sukeltas išorinių mechaninės energijos šaltinių, pvz., sunkio jėga).
Tipinė elektros pavaros funkcinė schema apima variklį, reduktorių (jei jis naudojamas), valdymo sistemą ir apkrovą. Apkrova prie variklio dažniausiai prijungiama per mechaninę perdavą su redukcijos koeficientu i. Kai yra keletas perdavos grandinių, skaičiavimuose schema redukuojama į vieno variklio ir vienos apkrovos sistemą.
Elektros pavarose elektros mašinos dažniausiai dirba variklio režimu. Todėl pasipriešinimo (apkrovos) momentas yra stabdantis variklio rotoriaus judėjimą ir priešinasi variklio momentui. Laikoma, kad pasipriešinimo momento teigiama kryptis yra priešinga variklio momento teigiamai krypčiai. Pagrindinė pavaros lygtis užrašoma taip:
M - Mst = Mdin = J · dω/dt (1.1)
Kur:
- M - variklio sukimo momentas, N·m;
- Mst - apkrovos mechanizmo pasipriešinimo momentas, N·m;
- Mdin - dinaminis momentas, N·m;
- J - suminis pavaros inercijos momentas, kg·m²;
- ω - variklio kampinis sukimosi greitis, rad/s;
- dω/dt - kampinis pagreitis.
Iš dinaminio momento išraiškos išplaukia, jog jo kryptis visuomet sutampa su elektros pavaros pagreičio kryptimi. Galimi trys elektros pavaros darbo režimai, priklausantys nuo dinaminio momento ženklo:
- Mdin > 0: įsibėgėjimas (kai ω > 0) arba stabdymas (kai ω < 0).
- Mdin < 0: stabdymas (kai ω > 0) arba įsibėgėjimas (kai ω < 0).
- Mdin = 0: nusistovėjęs režimas, t. y. ω = const.
Būtina pažymėti, kad lygtis (1.1) teisinga tik tada, kai besisukančios masės inercijos spindulys yra pastovus. Kai kuriais atvejais, pavyzdžiui, esant skriejiko-švaistiklio mechanizmui, pavaros kinematinės grandinės inercijos spindulys yra periodinė pasisukimo kampo α funkcija.
Pavaros įsibėgėjimo ir stabdymo trukmės randamos iš pagrindinės pavaros lygties (1.1), išsprendžiant dt nario atžvilgiu:
dt = (J · dω) / (M - Mst) (1.3)
Laikas, reikalingas pavarai įsibėgėti nuo greičio ω1 iki ω2 (ω2 > ω1), randamas iš lygties:
tįsibėgėjimas:1,2 = ∫ω1ω2 (J · dω) / (M - Mst) (1.4)
Asinchroninės pavaros mechaninės charakteristikos, maitinant iš dažnio keitiklio
Asinchroninės pavaros mechaninės charakteristikos, maitinant iš dažnio keitiklio, yra svarbus tyrimų objektas, leidžiantis suprasti, kaip kintant išėjimo dažniui ir įtampai keičiasi variklio sukimo momentas ir greitis.
Darbo tikslas šiuo atveju yra susipažinti su dažnio keitiklio darbu ir asinchroninio variklio mechaninėmis charakteristikomis, kai jis maitinamas iš dažnio keitiklio.
Užduotys apima:
- Susipažinimą su dažnio keitiklio išėjimo įtampos kreivės forma esant įvairioms dažnio vertėms.
- Eksperimentinį įtampos reguliavimo dėsnio nustatymą keičiant dažnį.
- Eksperimentinį mechaninių charakteristikų gavimą, esant skirtingoms dažnio vertėms.
Dažnio keitiklis leidžia reguliuoti ne tik dažnį, bet ir išėjimo įtampą, o tai yra esminė sąlyga norint išlaikyti pastovų sukimo momentą ties nuliniu greičiu ir sumažinti srovės viršįtampius paleidžiant variklį. Dažnio keitiklio išėjimo įtampos kreivės forma gali skirtis priklausomai nuo keitiklio tipo ir jo veikimo režimo. Reguliuojant dažnį, svarbu išlaikyti tinkamą įtampos ir dažnio santykį (V/f santykį), kad būtų užtikrintos optimalios variklio eksploatacinės savybės.
Eksperimentiškai nustatyti įtampos reguliavimo dėsnį, keičiant dažnį, leidžia suprasti, kaip keitiklis prisitaiko prie skirtingų darbo sąlygų. Gautos mechaninės charakteristikos, esant skirtingoms dažnio vertėms, parodo, kaip kinta variklio sukimo momentas priklausomai nuo greičio, kai maitinimo dažnis yra fiksuotas. Tai leidžia pasirinkti tinkamiausią darbo režimą įvairioms apkrovoms.
Elektros pavaros plačiai naudojamos įvairiose srityse: kompiuteriuose, telefonuose, automobiliuose, šildymo ir vėdinimo sistemose, vandens tiekimo ir nuotekų šalinimo sistemose. Jos gali atlikti pagrindinį arba pagalbinį darbą, dirbti nepertraukiamai arba trumpą laiką. Valdomos pavaros užtikrina specifinius darbo parametrus, o nevaldomos dirba pagal pastovų režimą.
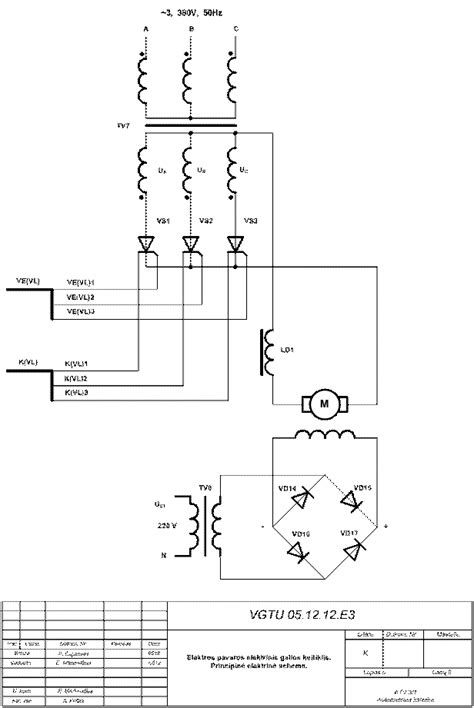
Reostatinės charakteristikos paprastai susijusios su nuolatinės srovės variklių valdymu, kur reostatas (varža) naudojamas srovės ar įtampos reguliavimui. Tačiau šiuolaikinėse elektros pavarose, ypač naudojant dažnio keitiklius, tradiciniai reostatai vis rečiau taikomi tiesioginiam variklio momentų ir greičio reguliavimui. Dažnio keitiklis atlieka panašią funkciją, bet daug efektyviau ir su platesnėmis galimybėmis, keisdamas ne tik varžą, bet ir maitinimo dažnį bei įtampą.
Istoriškai elektros pavarų atsiradimą lėmė M. Faraday atradimai elektros variklio veikimo principų srityje (1821 m. ir 1831 m.). Pirmąją elektros pavarą su elektromagnetų sistema 1834 m. sukonstravo B. Jakobi. Elektros pavaros plačiai paplito pramonėje po M. Dolivo-Dobrovolskio išradimo trifazio asinchroninio elektros variklio 1889 m.
tags: #elektros #pavaru #mechanika #ir #reostatines #charakteristikos